Featured system
Oceanic Measurement & Environmental Geospatial Array
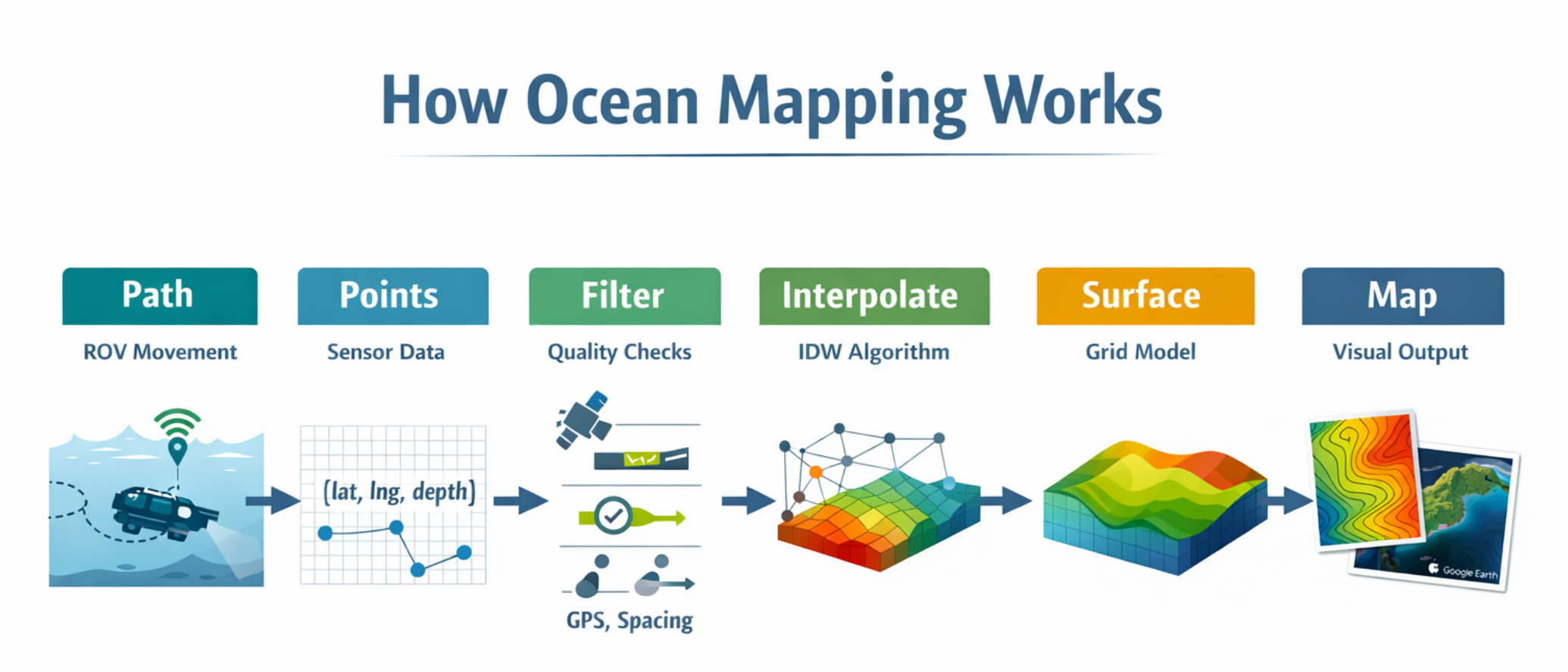
OMEGA is organized around three stages: capture, validation, and reconstruction.
That structure makes it useful both as a practical field system and as a way of explaining how the larger workflow operates.
The public repository includes the Arduino logger, Python mapping scripts, documentation,
example data, and a visual diagram of the overall pipeline.
Capture
Arduino logger with GPS, sonar, temperature, IMU, LCD, and SD
Processing
CSV parsing, filtering, IDW interpolation, contour generation
Outputs
Depth maps, continuous surfaces, KML points, and Earth overlays